Driving a Servo Motor — SIK Circuit 8
ہدایات
Parts & Introduction
Parts & Introduction
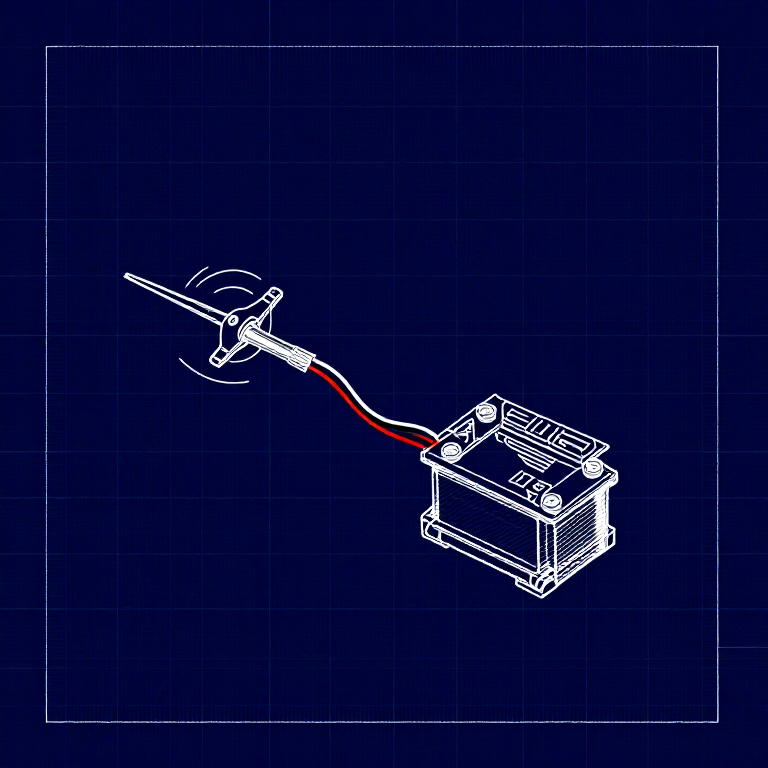
A servo motor can be precisely positioned between 0 and 180 degrees. Unlike a regular motor that just spins, servos hold their position — making them perfect for robotics, pan/tilt mechanisms, and control surfaces. This experiment introduces the Servo library.
Parts Needed
- 1x Arduino Uno + USB cable
- 1x Breadboard
- 1x Servo Motor (with 3-pin header)
- 8x Jumper Wires
The servo has three wires: Red (power), Black (ground), White (signal).
اس مرحلے کے لیے مواد:
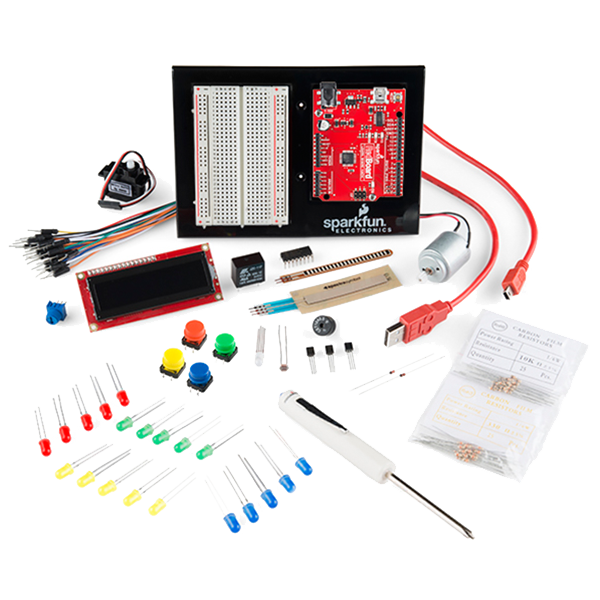 SparkFun Inventors Kit - V3.21 kit
SparkFun Inventors Kit - V3.21 kit Arduino Uno R31 piece
Arduino Uno R31 piece Breadboard1 piece
Breadboard1 piece Servo Motor1 piece
Servo Motor1 piece Jumper Wires3 pieces
Jumper Wires3 piecesدرکار اوزار:
Hardware Hookup
Hardware Hookup
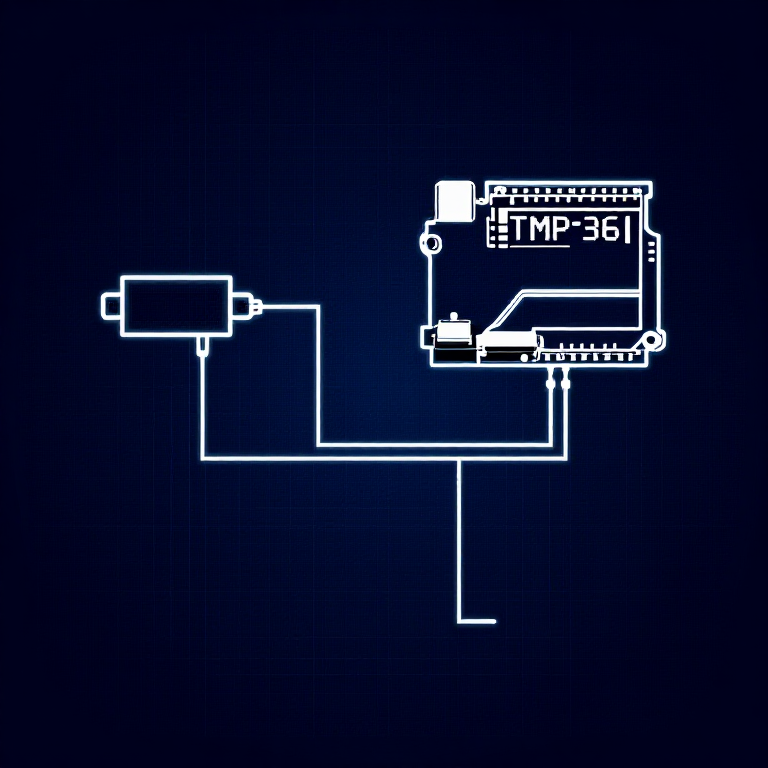
Wiring Instructions
- Connect 3 jumper wires to the servo's female 3-pin header for breadboarding.
- Connect the Red wire to 5V.
- Connect the Black wire to GND.
- Connect the White wire (signal) to Digital Pin 9.
Power Note: Servos draw significant current. If the servo twitches and the Arduino resets, use a wall adapter instead of USB power, or power the servo from a separate 5V supply.
اس مرحلے کے لیے مواد:
Servo Motor1 pieceJumper Wires3 piecesArduino Code
Arduino Code
Open the Arduino IDE and upload the following sketch to your Arduino board.
اس مرحلے کے لیے مواد:
Arduino Uno R31 pieceدرکار اوزار:
Test & Experiment
Test & Experiment
What You Should See
The servo quickly moves to 90°, 180°, and 0° (1 second each), then slowly sweeps from 0° to 180° and back.
Troubleshooting
- Servo not moving: Even with colored wires, it's easy to plug a servo in backwards. Check connections.
- Twitching/resetting: The servo draws too much power from USB. Use a wall adapter or separate power supply.
Experiments to Try
- Add a potentiometer (from Circuit 2) to control servo position with a knob.
- Change the step size and delay to experiment with speed and smoothness.
- Build a simple pan/tilt mechanism with two servos.
مواد
5- $105.00
- 1 pieceپلیس ہولڈر
- 1 pieceپلیس ہولڈر
- 1 pieceپلیس ہولڈر
Required Equipment
Equipment this kind of build typically needs — buy from any maker below.
- CriticalSoldering Iron·
 Helping Hands Soldering Stand
Helping Hands Soldering Stand Solder Tip Tinner and Cleaner
Solder Tip Tinner and Cleaner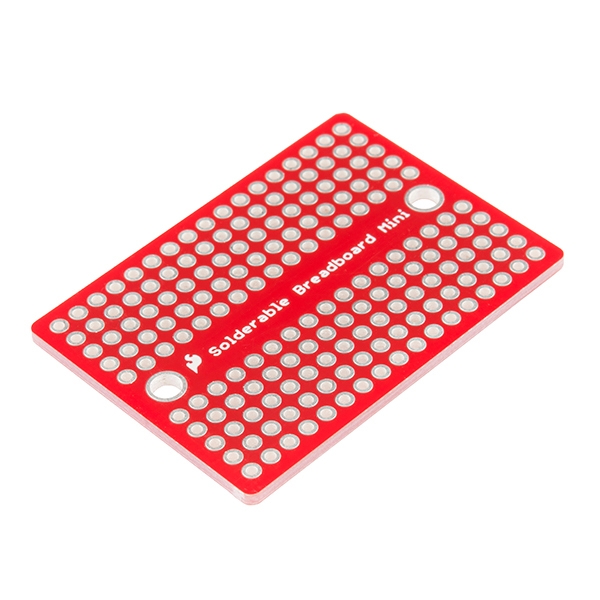 SparkFun Solder-able Breadboard - Mini
SparkFun Solder-able Breadboard - Mini Soldering Iron
Soldering Iron Solder Wire
Solder Wire Soldering Flux Paste (50g, Rosin-Based)
Soldering Flux Paste (50g, Rosin-Based) - RecommendedBreadboard·
 JST to Breadboard Jumper (3-pin)
JST to Breadboard Jumper (3-pin)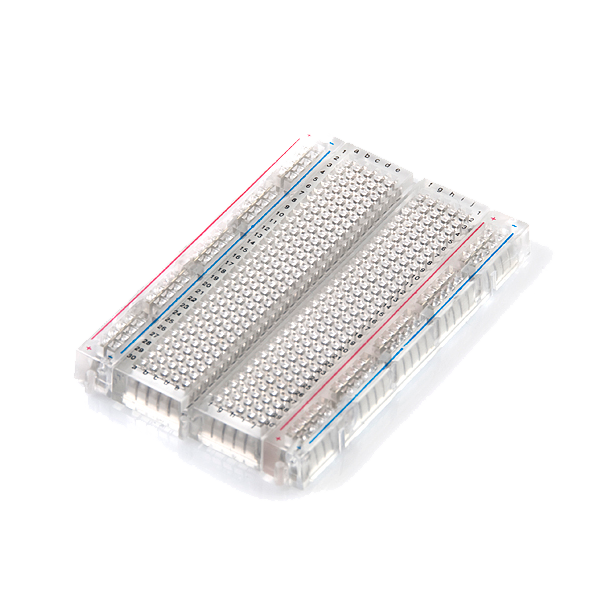 Breadboard - Translucent Self-Adhesive (Clear)Solderless Breadboard 830 Points (3-Pack)SparkFun Solder-able Breadboard - Mini
Breadboard - Translucent Self-Adhesive (Clear)Solderless Breadboard 830 Points (3-Pack)SparkFun Solder-able Breadboard - Mini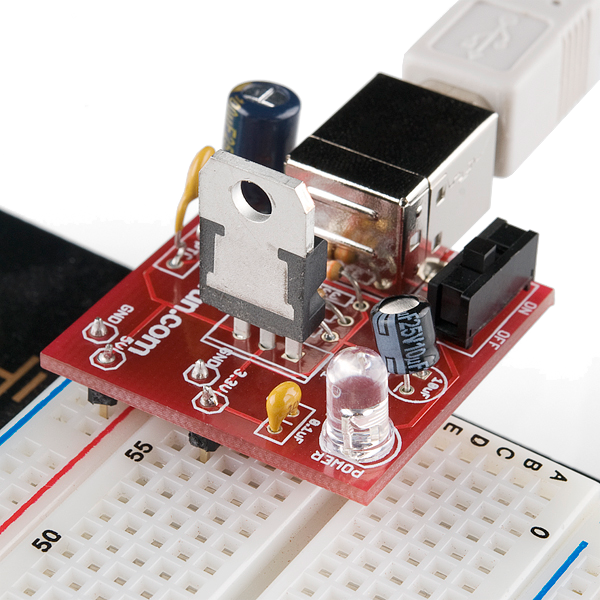 Breadboard Power Supply USB - 5V/3.3VBreadboard
Breadboard Power Supply USB - 5V/3.3VBreadboard - RecommendedDust Mask / Respirator·
 Full-Face Gas Mask (ABEK multi-gas cartridge)
Full-Face Gas Mask (ABEK multi-gas cartridge) Dust Mask
Dust Mask Venetian Mask Blank (Papier-Mache)
Venetian Mask Blank (Papier-Mache) Full-Face Respirator
Full-Face Respirator Respirator Fit Test Kit
Respirator Fit Test Kit Respirator with Acid Gas Cartridge
Respirator with Acid Gas Cartridge - RecommendedMultimeter·
 Multimeter Tweezer Probes
Multimeter Tweezer Probes Digital Multimeter - Basic
Digital Multimeter - Basic Digital Multimeter Pro
Digital Multimeter Pro Multimeter
Multimeter Digital Multimeter (Auto-Range, True RMS)Digital Multimeter
Digital Multimeter (Auto-Range, True RMS)Digital Multimeter - RecommendedSafety Glasses·
 Safety Sign (Caution/Warning)
Safety Sign (Caution/Warning) Splash-Proof Safety Goggles
Splash-Proof Safety Goggles Reflective Safety Vest Kit (DIY)
Reflective Safety Vest Kit (DIY) Chemical Splash Goggles
Chemical Splash Goggles Safety Netting for Rockfall
Safety Netting for Rockfall Steel-Toed Safety Boots
Steel-Toed Safety Boots - RecommendedWire Strippers·
 Wire Strippers
Wire Strippers Wire Stripper & Crimping Tool (AWG 10-22)
Wire Stripper & Crimping Tool (AWG 10-22) Wire Stripper
Wire Stripper - RecommendedWork Gloves·
 Boxing Gloves (Training)
Boxing Gloves (Training) Leather Gauntlet Gloves
Leather Gauntlet Gloves Cotton Gloves
Cotton Gloves Welding Gloves
Welding Gloves Heavy-Duty Gloves
Heavy-Duty Gloves Leather Work Gloves
Leather Work Gloves - OptionalFire Extinguisher·
 ABC Fire Extinguisher
ABC Fire Extinguisher Fire Extinguisher
Fire Extinguisher - OptionalFirst Aid Kit·
 First Aid Kit
First Aid Kit Mountain First Aid Kit (Altitude)
Mountain First Aid Kit (Altitude) Workshop First Aid Kit
Workshop First Aid Kit Bow Release Aid
Bow Release Aid - OptionalHelping Hands / Third Hand·Helping Hands Soldering Stand
 Helping Hands
Helping Hands PCB Holder Helping Hands (with Magnifier)
PCB Holder Helping Hands (with Magnifier) Helping Hands (Third Hand)
Helping Hands (Third Hand)
You can swap these in
Can't get one of the materials? Swap it for an equivalent — these work just as well.
- Instead of Arduino Uno R3, try:
 Prototyping Shield for Arduino Uno (3-Pack)
Prototyping Shield for Arduino Uno (3-Pack) Arduino Uno R3 BoardArduino Uno
Arduino Uno R3 BoardArduino Uno - Instead of Servo Motor, try:
 Vibration Motor Assortment
Vibration Motor Assortment SG90 Micro Servo Motor (5-Pack)
SG90 Micro Servo Motor (5-Pack) Marine Brushless Motor
Marine Brushless Motor Vibration Motor
Vibration Motor Stepper Motor - 125 oz.in (200 steps/rev)
Stepper Motor - 125 oz.in (200 steps/rev) Stepper Motor - 68 oz.in (400 steps/rev)
Stepper Motor - 68 oz.in (400 steps/rev) DC MotorDC Gear Motor 6V (4-Pack with Wheels)
DC MotorDC Gear Motor 6V (4-Pack with Wheels) - Instead of Breadboard, try:
 Solder-able Breadboard
Solder-able Breadboard
Recommended for this build
Products makers often use with builds like this one.
 Resistor 330 Ohm 1/6 Watt PTH - 20 packUsed together and in similar builds
Resistor 330 Ohm 1/6 Watt PTH - 20 packUsed together and in similar builds Diode KitUsed together and in similar builds
Diode KitUsed together and in similar builds 5mm LED Assortment Kit (300pcs, 5 Colors)Used together and in similar builds
5mm LED Assortment Kit (300pcs, 5 Colors)Used together and in similar builds Flex Sensor 2.2 InchUsed together and in similar builds
Flex Sensor 2.2 InchUsed together and in similar builds Resistor 10K Ohm 1/6th Watt PTH - 20 packUsed together and in similar builds
Resistor 10K Ohm 1/6th Watt PTH - 20 packUsed together and in similar builds Relay ModuleUsed in similar builds
Relay ModuleUsed in similar builds Temperature SensorUsed in similar builds
Temperature SensorUsed in similar buildsRelated blueprints
Other builds that share materials, tools, or techniques with this one.

CC0 پبلک ڈومین
یہ بلیو پرنٹ CC0 کے تحت جاری کیا گیا ہے۔ آپ اجازت لیے بغیر اس کام کو نقل، ترمیم، تقسیم اور کسی بھی مقصد کے لیے استعمال کرنے کے لیے آزاد ہیں۔
میکر کی حمایت کریں ان کے بلیو پرنٹ کے ذریعے پروڈکٹس خرید کر جہاں وہ میکر کمیشن وینڈرز کی طرف سے مقرر، کماتے ہیں، یا اس بلیو پرنٹ کی نئی تکرار بنائیں اور آمدنی شیئر کرنے کے لیے اسے اپنے بلیو پرنٹ میں کنکشن کے طور پر شامل کریں۔